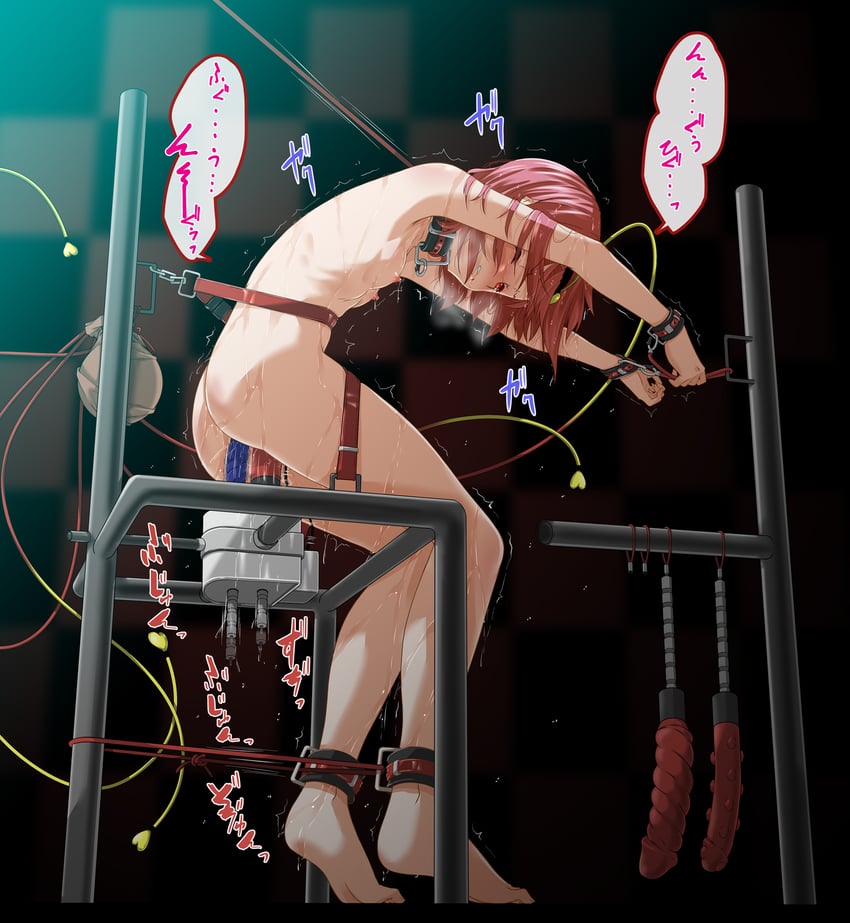
The setup isn't very restrictive, and she still has a lot of control of movement on her legs and hands. Despite that her neck and waist restraints would keep her from moving out of the abdomen restraint.
Her legs are disproportionately large compared to her torso, where we can see her ribs are visible. From this we can assume she's lost weight quickly and hasn't been captive long enough to lose muscle mass from inactivity. This means she's being starved and won't have much strength. Despite the thin, unbraided ropes, she won't be able to break out with brute force.
However, the captor made a critical mistake, the spare dildos are within grabbing distance. Here's how she will escape:
She can't use her hands to grab them because the ropes on her arms aren't long enough to slide the dildos off the rack. Instead she'll have to move one leg back, and pull one of the dildos back with her toes. Once it's out, bring it within grabbing distance of her hands, pick it up and repeat with the second dildo.
Wrap the connected metal rods on the dildos around the lines connecting her hands together, on opposite ends of the bar, so she can twist with one hand and hold the other end still. The ropes look to be about an inch in diameter, and would be doubled at 2 inches when twisted around itself. The rods look about 8 inches in diameter.
8in. x Pi = 25.13
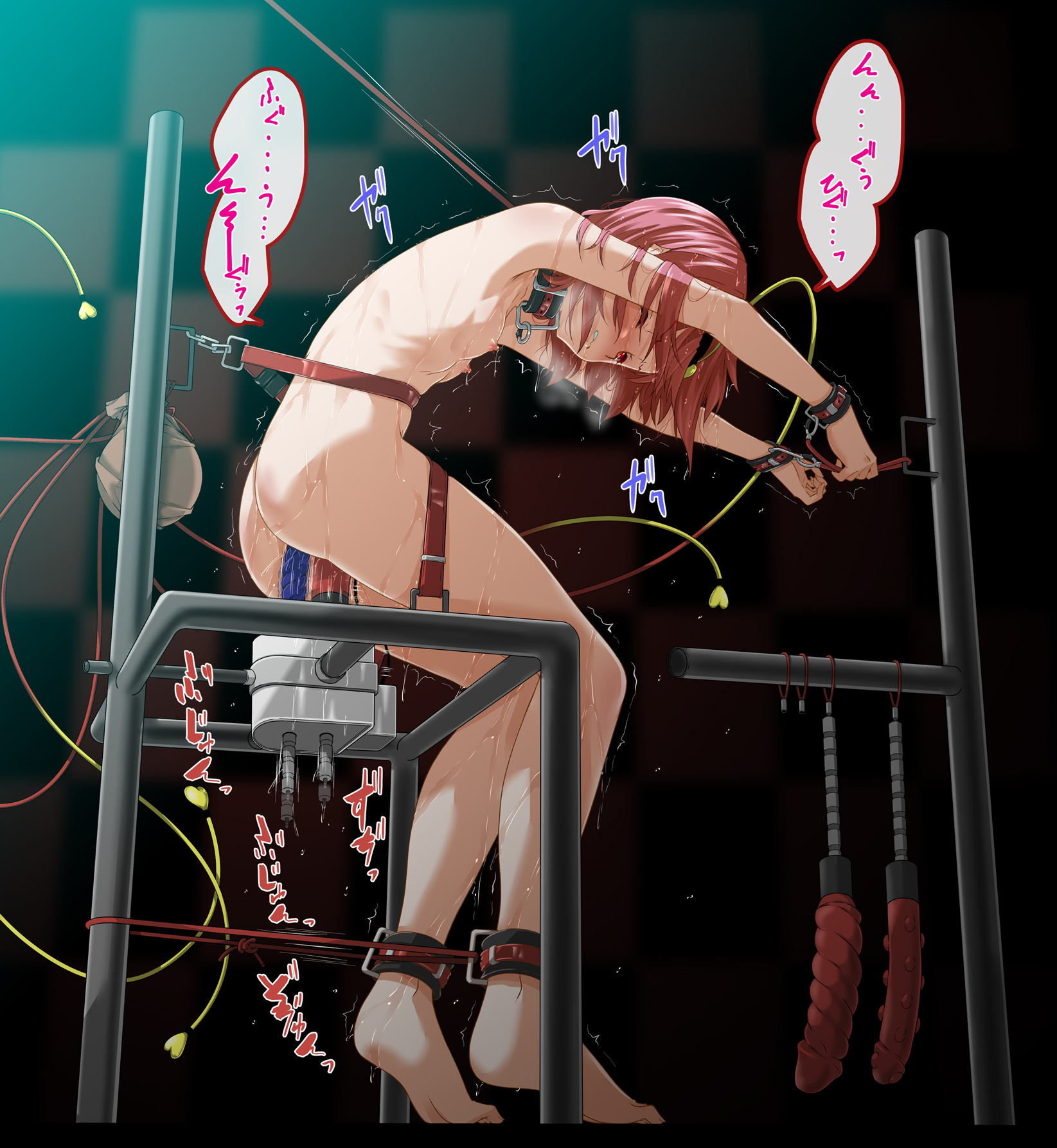
With every full twist of the dildo she'll move her arms 25 inches and apply it over 2 inches of movement, multiplying the force applied by a factor of 12.5. Even with a weak and tired Satori, the leverage generated should be more than enough to break the thin rope connecting her arms together. The reason we need both dildos is because without one dildo to hold the rope down on one end, the force would have broken her wrist.
Does this mean she can repeat the same process on all of her restraints and escape now? Not quite. Freeing her arms is a good starting point, and while it does allow us to repeat the process on the rope holding her neck, the feet and the abdomen restraints are a problem. Remember, this whole time she's been in a dildo torture machine, although having no seat gives her more movement options, it also makes movement a lot more dangerous. Twisting around to break the thin chains holding the abdomen restraint in place could seriously injure her.
Thankfully there's a simple solution to this. However, before I can explain the solution I have to explain what the machine does and how it (most likely) works. The dildos are moving up and down, over and over, this is called reciprocating motion, or back and forth motion in a single line. The machine’s small size tells me it is most likely electronically powered, as there wouldn’t be enough space for a combustion system. Back and forth movement is already achieved by default when using a combustion piston system, but since this machine is electric it would instead use rotating motors and convert that force into linear motion through either a crankshaft or a gear driveshaft. A crankshaft can create linear reciprocating motion just by moving in one direction, but a driveshaft would need the motor to change directions with the dildos.
Why is this information significant? If the machine uses a crankshaft system we can place the dildo’s metal connector rod under them to jam or even break the machine.
If Nitori is the one responsible for all this she might’ve just quickly made a rudimentary gear driveshaft that switches motor direction constantly instead of designing a more efficient one-way crankshaft system. Although there aren’t many hints as to who the captor is I feel confident Nitori isn’t one of them. Someone as mechanically proficient as her wouldn’t have used these inefficient restraints. Since she has difficulty making magic tools she would be experienced in conventional systems, like rope knots. This rules out the chance of the machine being a quick and dirty hack job, and instead a purchased, manufactured item.
There is a concept called the KISS principle. An acronym for “Keep it simple, stupid!” In short, it says things should be kept as simple as possible, since complexity increases potential points of failure. This is especially important in manufacturing, where unneeded complexity can also increase the cost to create an item. As changing motor direction would need another system to tell the motor when to change direction, a design team will always favor a one way crankshaft system over a driveshaft when reciprocating motion is needed.
Now that we know for sure the machine uses a crankshaft, Satori can jam it with one of her dildos. Then she can safely twist around and break the thin chains holding her abdomen belt in place.
Satori now has her hands, neck, and upper body free, and the machine is disabled, but the waist belt and ankle restraints still hold her in place. The bar of metal holding down the abdomen belt is thin, but we can’t break it with leverage as it is. There would just be too much space to effectively leverage against it sideways, especially when she’s in such an awkward position for applying force. Leveraging vertically is out of the question because of the round pipe. We could try taking out the dildo that’s jamming the machine but there isn’t enough space to fit both dildo rods in the bar.
However, it isn’t over yet. We still have one more tool left to use. The belt she broke off is still wrapped around her. After sliding it over her head she can place it in the hole to fill in the gap between the dildo rod and the pipe, and effectively leverage to break the restraint holding her waist down! She’s now free to stand up, with only the ankle restraints left, but these can now easily be broken with the same method we used to break the arm restraints.
Will her full body free she can break the rod her third eye is wrapped around, and walk away!

{kind=link}